
咨询热线:
07452836166
07452836166

特斯拉股东大会定档6月3日,5月20日公司已提前发布了引人瞩目的宣传视频,特斯拉人形机器人有望在2024年第三或第四季度开启预售。此外,2024年下半年,世界人工智能大会和世界机器人大会等重大论坛将相继举行,将为人形机器人行业带来密集的催化效应。
在特斯拉人形机器人的硬件构成中,触觉传感器是关键的传感器零部件,能够为人形机器人提供数据输入,通过将外部刺激如压力、振动和热刺激转化为传感元件的变化,从而完成机器人的感知过程。
根据GGI的预测,到2030年全球人形机器人领域对于柔性触觉传感器或电子皮肤的需求将达到152.5万平方米,市场规模预计会扩大至274亿元。

触觉传感器是机器人感知环境的关键部件,能够直接检测机器人与环境之间的各种交互作用,如接触力、温度以及接触物体的材质、软硬程度等特性。
触觉传感器的逼真程度主要取决于是否具有柔性,这决定了它能否更真实地模拟人类的触觉感知能力。
在触觉传感器的工作过程中,触觉传感器阵列发挥核心作用。
触觉传感器阵列能够将各种物理信号,如波形转换成电流或电压波形,这些电信号随后通过数字电路进行精确处理,并以电磁波的形式进行传输。在传输完成后另一个传感器会接收这些信号,并将其转换成机器人系统可以理解和使用的信号形式,从而实现对环境的全面和精准感知。
特斯拉Optimus的每只手指都配备柔性触觉传感器:

触觉传感器主要分为柔性和刚性两大类,其中刚性传感器以微机电系统(MEMS)为主。
根据工作原理的差异,触觉传感器又可以分为压阻式(也称电阻式)、电容式、电感式、压电式、光电式、摩擦电式以及视觉式等多种类型。
压阻式传感器是目前的主流产品,具有高灵敏度和强大的过载承受能力。但是也存在一些缺点,如压敏电阻的漏电流稳定性较差、体积较大难以实现微型化、功耗高、容易受到噪声干扰,以及接触表面较为脆弱等,
对于人形机器人来说,为了实现更为精细的操作,多维触觉传感器被认为是未来的发展方向。
柔性传感器能够覆盖在机器人机体表面,具有可伸缩、可弯曲的特性,是触觉传感器的理想形式。柔性传感器还具有优异的机械性能和生物相容性。
此外,柔性传感器还能测量动态或形状变化的物体。即便是在受到一定程度的弯折或拉伸后,传感性能依然保持稳定
具有高柔弹性的电子皮肤触觉传感器阵列能够模仿甚至超越人类皮肤的感觉功能,能够有效地实现机器人的触觉感知。
高柔弹性的仿生电子皮肤触觉传感器阵列:
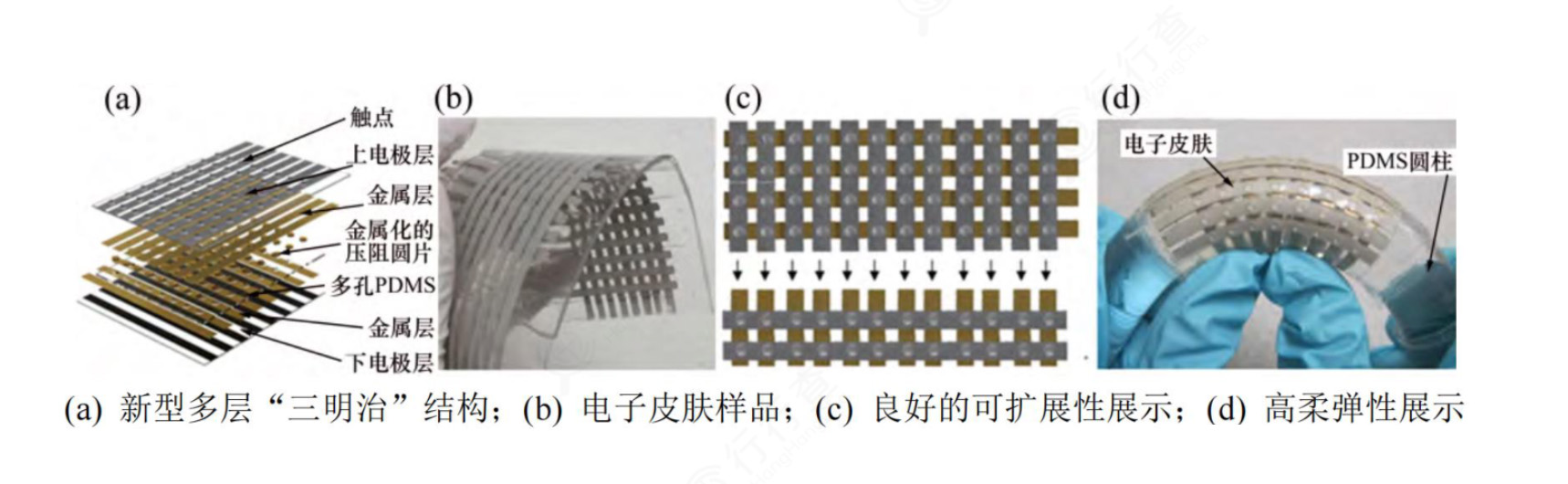
电子皮肤的材料必须满足轻薄、柔软的特性,还应具备可拉伸性。电子皮肤可以覆盖在人形机器人的多个部位,使用的柔性基体材料包括聚二甲基硅氧烷和聚偏氟乙烯
根据柔性传感器的特性和实际应用需求,其常用材料主要包括柔性基底、碳材料以及无机半导体材料等。
Copyright © 2022 湖南昱烯瓴新材料有限公司官方产品宣传站点 湘ICP备2023027391号 XML地图
