
咨询热线:
07452836166
07452836166

感知层是人形机器人的关键环节,该环节集成了多种传感器提供全面的外部和内部感知能力。
传感器使人形机器人通过触觉、视觉和听觉等感知方式与外部环境进行交互,还能使其感知自身的实时状态。
当前传感器在人形机器人中的用量大且成本占比相对较高。以特斯拉的Optimus机器人为例,各类传感器的成本占比高达近30%。
随着人形机器人加速进入发展阶段,传感器行业也将迎来广阔的发展机遇
国内领先的人形机器人整机厂商包括优必选、达阀、智元、傅利叶、宇树、追觅以及小米等公司,已广泛采用了各类传感器.

1、触觉传感器
机器人的触觉传感系统是通过物理接触来探测和衡量物体特征的方式,能够帮助机器人感知和理解其周围环境
触觉传感器能够直接检测机器人与环境之间的相互作用,如接触力、温度物体的材质硬度和柔软度等特性。
触觉传感器作为视觉传感的重要补充,可以使机器人通过触摸来感知物体的形状、质地等物理特性,从而进行精确的抓取操作,广泛应用于机器人的关节、柔性皮肤等领域
在工作原理上,触觉传感器阵列将各种物理波形信号转换为电流或电压波形,随后通过数字电路进行处理,并以电磁波的形式进行传输。在接收端,另一个传感器会捕获这些信号,并将其转换回所需的信息形式。
触觉传感器在很大程度上取决于其是否具有柔性,因此柔性触觉传感器往往具有更高的价值。
柔性触觉传感器的制造面临多方面的挑战,主要体现在材料和制造工艺上。材料方面需要解决如何在保持柔性的同时实现多维力的检测。制造工艺上则必须确保传感器在拉伸、挤压和扭转变形等情况下仍能正常识别力矩、温度等关键参数。
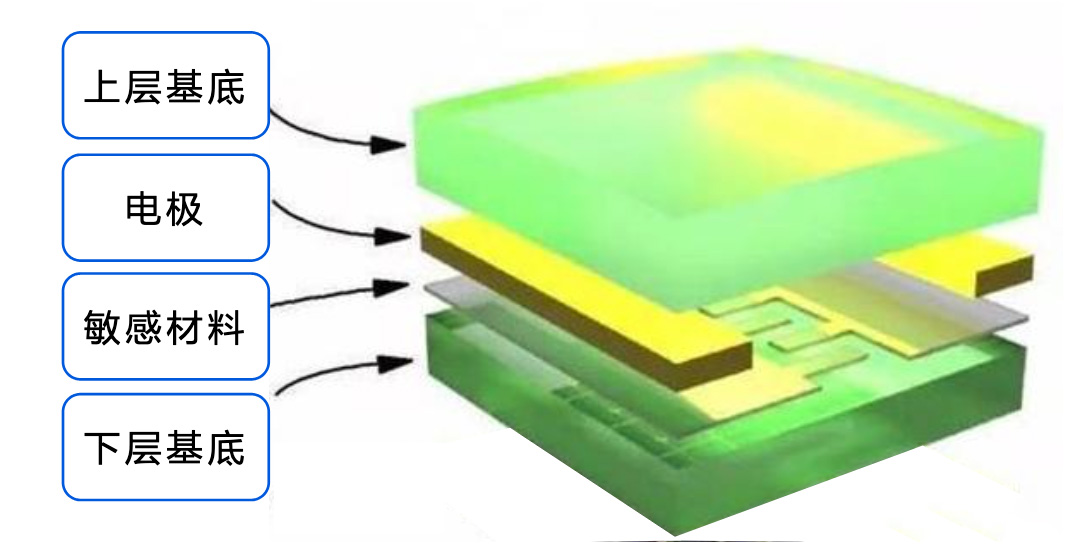
柔性触觉传感器结构拆解:
2、力传感器
力/力矩传感器矩传感器使机器人在执行操作时能够自主调整其姿态,从而确保操作的稳定性和精确度。
力矩传感器对于机器人实现力感知十分重要。人形机器人通过主动力控制技术来模拟触觉感知,力传感器是实现精准力控的首选方式
通过力传感器与闭环控制算法的结合,机器人能够精确地控制力度。根据传感器的安装位置,力控方式可分为末端力控和关节力控两种。未端力控是在机械臂的末端安装维或六维力传感器。
能够给出最为全面和精准的力觉数其中六维力传感器提供了最高维度的力觉信息数据。

3、IMU惯性传感器
IMU(惯性测量单元)是保持机器人的平衡和实现稳定行走的关键所在。IMU传感器在行业中的应用主要在三个方面:惯性导航、惯性测量和惯性稳控,全面适配人形机器人。
惯性传感器能够实时监测机器人的运动状态,确保根据实际情况进行及时调整
IMU的关键部分包括陀螺仪和加速度计,这两部分也是主要的BOM成本。硬件方面陀螺仪的制造难度较高,软件方面主要的挑战则在于算法控制,车载IMU相比机器人上的IMU在精度和零偏稳定性方面的要求更高
Copyright © 2022 湖南昱烯瓴新材料有限公司官方产品宣传站点 湘ICP备2023027391号 XML地图
